볼트 빈 피킹 시스템


상세설명
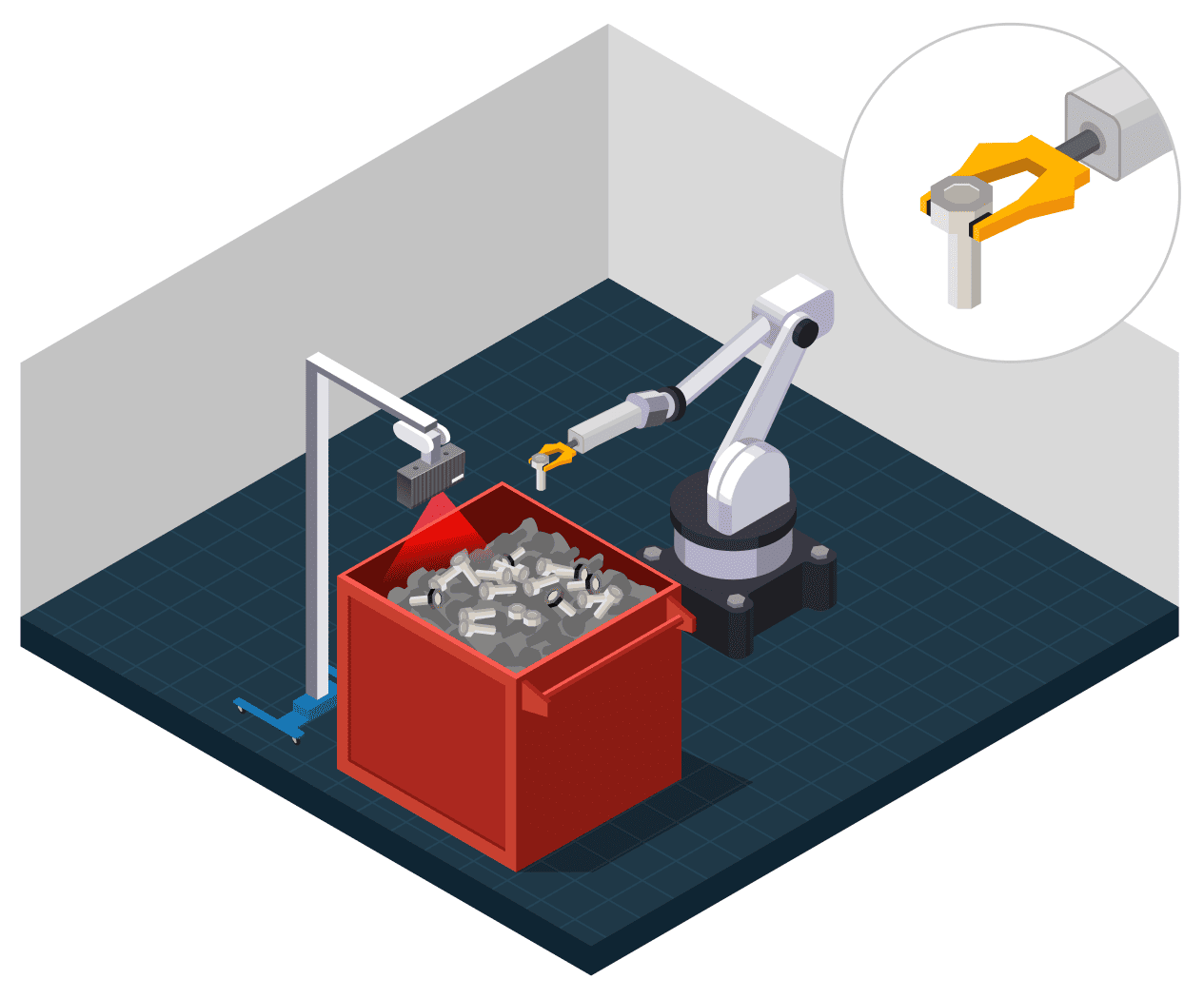
적재함에 불규칙하게 쌓인 볼트를 볼트러너의 카트리지에 신속하게 투입하기 위해, 한 번의 촬영으로 여러 볼트의 자세를 감지하여 최대 3개의 볼트를 동시에 피킹할 수 있습니다. 또한, 피킹 과정에서 볼트 산의 무너짐이나 위치 변화를 최소화하도록, 사용자 지정 우선순위 기반의 빈 피킹(Bin Picking) 기술을 제공합니다.
이 솔루션은 기존의 드럼 방식 볼트 정렬기보다 더욱 유연한 작업 환경을 지원합니다. 특히, 제한적인 더미 용량, 볼트 유형의 제약, 불량 볼트 선별 등의 측면에서 더욱 높은 효율을 제공합니다.
볼트 빈 피킹 시스템 동작 원리 및 분석 과정

1. 원본 이미지 촬영: 고정밀 3D 데이터 취득 (Image Scan)
무질서하게 혼재된 3종의 볼트를 CoPick3D 비전 카메라로 정밀 스캔합니다. 복잡하게 쌓여있는 환경에서도 각 객체의 위치와 자세 데이터를 정확하게 추출합니다.

2. 분석 및 우선순위 지정: 지능형 피킹 경로 최적화 (Analysis & Priority)
CoPick3D로 촬영한 데이터를 AI 알고리즘으로 분석하여 최적의 피킹 순위를 실시간으로 산출합니다. 초록색 하이라이트는 충돌 위험이 가장 적고 파지가 용이한 1순위 대상을 나타냅니다.
응용 사례
▲ AW2026 (서울, 코엑스)에서 볼트 빈 피킹 시스템을 선보였습니다.
핵심기술
- 고정밀 피킹을 위한 3차원 로봇 가이던스 (FinePicker 3D)


